●理論概要
 原画像 パラメータ平面(Hough曲線群)
1.これまでのHough(ハフ)変換は次の3つのステップにより直線を検出する。
①X-Y原画像の中の点群をθ-ρパラメータ平面上のHough曲線群に変換する。
→Hough曲線の軌跡のセルのカウンターを+1する。
原画像の点を(X,Y)とすると、Hough曲線は下式で与えられる。
ρ=X・cosθ+Y・sinθ
※上図では、原画像の点Pnをパラメータ平面のHough曲線nに変換している。
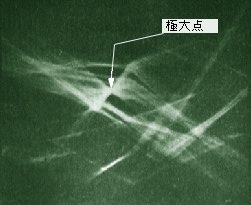
②θ-ρパラメータ平面上で、Hough曲線群の交点を求める。
→具体的にはセルカウンターが極大となるセルの座標(θs,ρs)を求める。
※上図では交点(θ0,ρ0)で示される。
③求める直線は次式で与えられる。
ρs=X・cosθs+Y・sinθs
※上図では原画像の直線Lがこれに相当する。
2.Hough変換の問題点
三角関数の演算が不可避のため、演算コストが大きく、高速化に向かない。
3.本特許の解決法
原画像 パラメータ平面(Hough曲線群)
1.これまでのHough(ハフ)変換は次の3つのステップにより直線を検出する。
①X-Y原画像の中の点群をθ-ρパラメータ平面上のHough曲線群に変換する。
→Hough曲線の軌跡のセルのカウンターを+1する。
原画像の点を(X,Y)とすると、Hough曲線は下式で与えられる。
ρ=X・cosθ+Y・sinθ
※上図では、原画像の点Pnをパラメータ平面のHough曲線nに変換している。
②θ-ρパラメータ平面上で、Hough曲線群の交点を求める。
→具体的にはセルカウンターが極大となるセルの座標(θs,ρs)を求める。
※上図では交点(θ0,ρ0)で示される。
③求める直線は次式で与えられる。
ρs=X・cosθs+Y・sinθs
※上図では原画像の直線Lがこれに相当する。
2.Hough変換の問題点
三角関数の演算が不可避のため、演算コストが大きく、高速化に向かない。
3.本特許の解決法
 パラメータ平面(Hough直線群)
「Hough曲線のかわりに、端点を共有する複数の区分的直線セグメント
からなるHough直線に置き換えた。」
①一番簡単な例では、上図の様に0,π/2,πでHough曲線(ピンク色)
と交わる様な2本の区分直線からなるHough直線がある。
②Hough曲線の分割数(ex.4など)や分割範囲も全く任意でよい。
③直線の演算は基本的に足し算だけであり、高速化が計れる。
④本手法は単なる曲線を近似したものではなく、直線検出時における近似誤
差を全く伴わない。
⑤本手法で機械部品の画像から、稜線の直線を検出した例を下に示す。
パラメータ平面(Hough直線群)
「Hough曲線のかわりに、端点を共有する複数の区分的直線セグメント
からなるHough直線に置き換えた。」
①一番簡単な例では、上図の様に0,π/2,πでHough曲線(ピンク色)
と交わる様な2本の区分直線からなるHough直線がある。
②Hough曲線の分割数(ex.4など)や分割範囲も全く任意でよい。
③直線の演算は基本的に足し算だけであり、高速化が計れる。
④本手法は単なる曲線を近似したものではなく、直線検出時における近似誤
差を全く伴わない。
⑤本手法で機械部品の画像から、稜線の直線を検出した例を下に示す。
[例1]機械部品1から稜線1本を抽出
SOBEL法でエッジを検出した後、各エッジ点に対し区分的Hough直線
をθ-ρパラメータ平面に生成。セルカウンターが極大となる点を抽出し、逆
変換式によって原画像上の直線を検出している。
 原画像(機械部品1) エッジ画像(SOBEL)
原画像(機械部品1) エッジ画像(SOBEL)
 θ-ρパラメータ平面 直線検出画像
θ-ρパラメータ平面 直線検出画像
[例2]機械部品2から直線4本を抽出

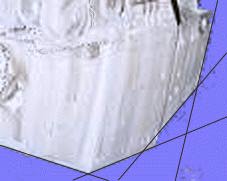 原画像(機械部品) 処理画像(稜線抽出)
4.本理論からWARPモデルへ
①本特許は下記論文をベースとしている。
原画像(機械部品) 処理画像(稜線抽出)
4.本理論からWARPモデルへ
①本特許は下記論文をベースとしている。
輿水大和、沼田宗敏:”区分的Hough直線による高速Hough変換法PLHTについて”,
電子情報通信学会論文誌Vol.J72-D-Ⅱ No.1 PP.56-65(1989)
②拡張Hough曲線
Hough曲線とHough直線は位相幾何学(トポロジー)で言う位相
同型の関係に当たる。Hough曲線と位相同型の性質を持つ曲線または
直線を、拡張Hough曲線という。本特許は拡張Hough曲線の1つ
であり、初期に発見された変換群の1つでもある。
③Warpモデル
拡張Hough曲線は、Hough曲線が生成されるθ-ρパラメータ平
面を任意にゆがませて生成する事ができる。このゆがませ方により、直線
検出時に様々な有益な性質を持つ拡張Hough曲線を作り出す事ができ
る。これをWarpモデルという(輿水、沼田、村上らが提案)。
 ■WARPモデルの概念図
パラメータ空間をゆがませて所望の機能
を持つ拡張Hough関数を得る。
■WARPモデルの概念図
パラメータ空間をゆがませて所望の機能
を持つ拡張Hough関数を得る。
 にがお絵BYみなみ芳高
にがお絵BYみなみ芳高

 とやまテクノフェア
とやまテクノフェア
 原画
原画 処理画
処理画
